Design process
Design process
Design process
Design brief:
Design a robotic solution that accelerates the transition to sustainable plant-based agriculture.
Design brief:
Design a robotic solution that accelerates the transition to sustainable plant-based agriculture.
Design brief:
Design a robotic solution that accelerates the transition to sustainable plant-based agriculture.
Design brief:
Design a robotic solution that accelerates the transition to sustainable plant-based agriculture.
Terraio is an autonomous field robot built to turn farm data into action. It maps the land, reveals what matters, and helps farmers respond with precision. A modular system for smarter, more sustainable agriculture.
Terraio is an autonomous field robot built to turn farm data into action. It maps the land, reveals what matters, and helps farmers respond with precision. A modular system for smarter, more sustainable agriculture.
An autonomous field robot for smarter, data-driven farming.
Starting Point
Starting Point
Starting Point

Redesigning Terraio to improve human-robot interaction.
Redesigning Terraio to improve human-robot interaction.


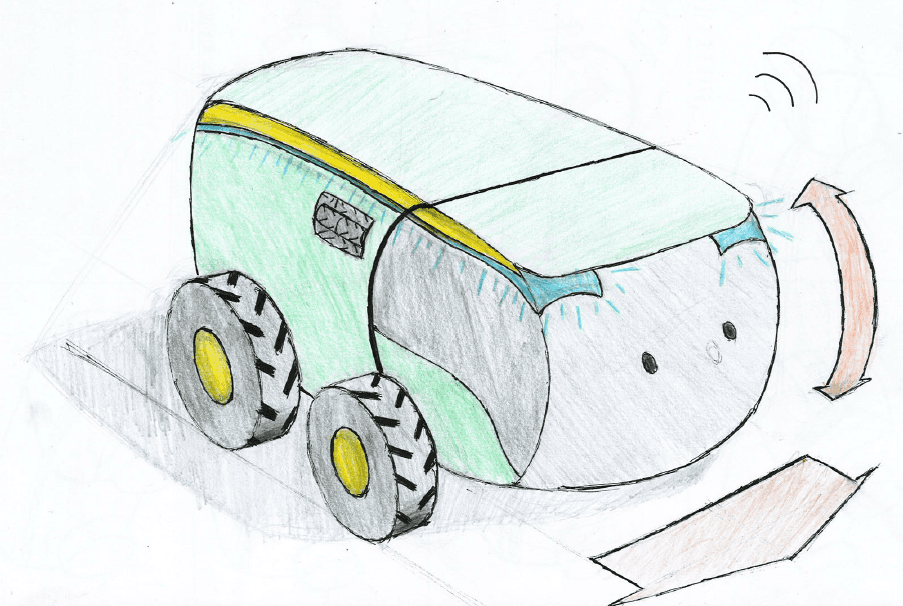

Research was conducted to explore how human-robot interaction could be improved. This was done through the use of color, sound effects, and moving elements, with the goal of creating a robot that farmers would fall in love with and fully accept. The concepts were first tested through animated renders presented to a farmer, after which the strongest direction was developed into a physical prototype.
Research was conducted to explore how human-robot interaction could be improved. This was done through the use of color, sound effects, and moving elements, with the goal of creating a robot that farmers would fall in love with and fully accept. The concepts were first tested through animated renders presented to a farmer, after which the strongest direction was developed into a physical prototype.
Improving human-robot interaction through color, sound, and motion.
Designing a suitable base station.
Designing a suitable base station.
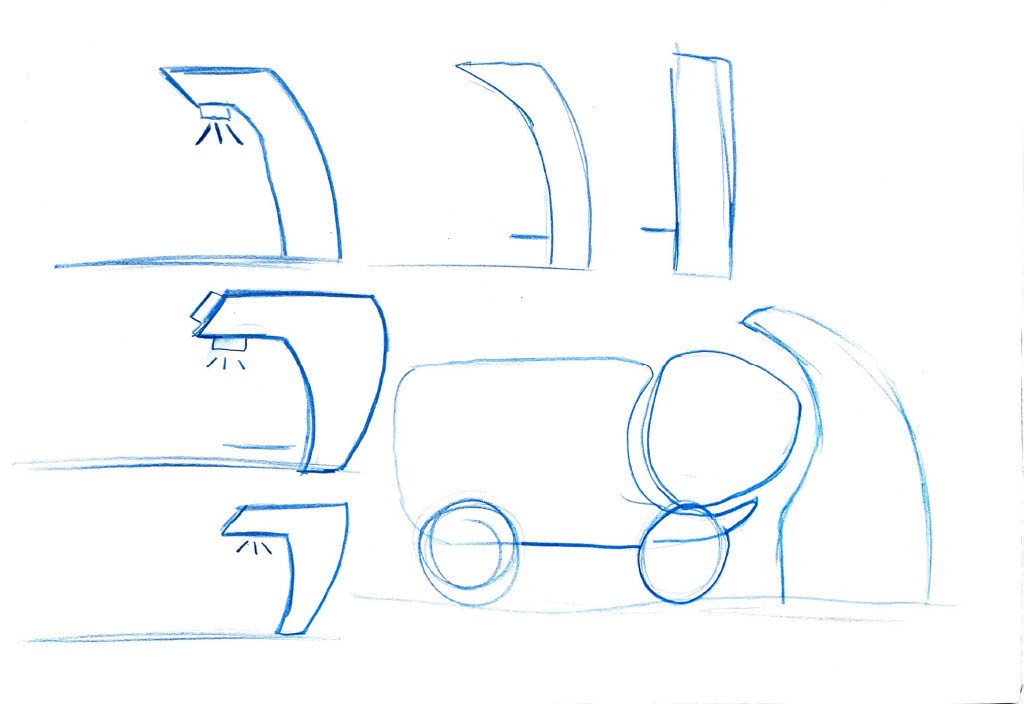
Initial Ideation
Initial Ideation
Initial Ideation




CAD moddeling
CAD moddeling
CAD moddeling
Feedback from a farmer showed that the base station was not yet suitable. Since no electricity is available at the edge of the field, it needed to generate and store its own power.
Feedback from a farmer showed that the base station was not yet suitable. Since no electricity is available at the edge of the field, it needed to generate and store its own power.
The base station needed to generate and store its own power.
Improved version
Improved version




The improved version features two large solar panels, including a roof-mounted panel that rotates with the sun to maximize energy generation. The battery is integrated into the base station and offers three times the capacity of the robot’s own battery.
The improved version features two large solar panels, including a roof-mounted panel that rotates with the sun to maximize energy generation. The battery is integrated into the base station and offers three times the capacity of the robot’s own battery.
The improved base station uses solar power and a high-capacity battery for off-grid operation.
Building hands-on experience with a hyperspectral camera.
Building hands-on experience with a hyperspectral camera.


Hands-on experience revealed major practical challenges in using a hyperspectral camera. The current design made it difficult to capture accurate, meaningful images, leading to a complete redesign of the system.
Hands-on experience revealed major practical challenges in using a hyperspectral camera. The current design made it difficult to capture accurate, meaningful images, leading to a complete redesign of the system.
Redesigning for better spectral scans.
A series of quick form sketches was created for rapid evaluation with a hyperspectral imaging expert.
Quick concept sketches were made for evaluation with a hyperspectral imaging expert.
Quick concept sketches were made for evaluation with a hyperspectral imaging expert.





The evaluation showed that the lab conditions had to be replicated as closely as possible by blocking sunlight and wind to improve scan quality. The form that performed best was developed further.
The evaluation showed that the lab conditions had to be replicated as closely as possible by blocking sunlight and wind to improve scan quality. The form that performed best was developed further.
Optimized for common crops, field mobility, and easy maintenance.
Refining the design.
Refining the design.
Refining the design.





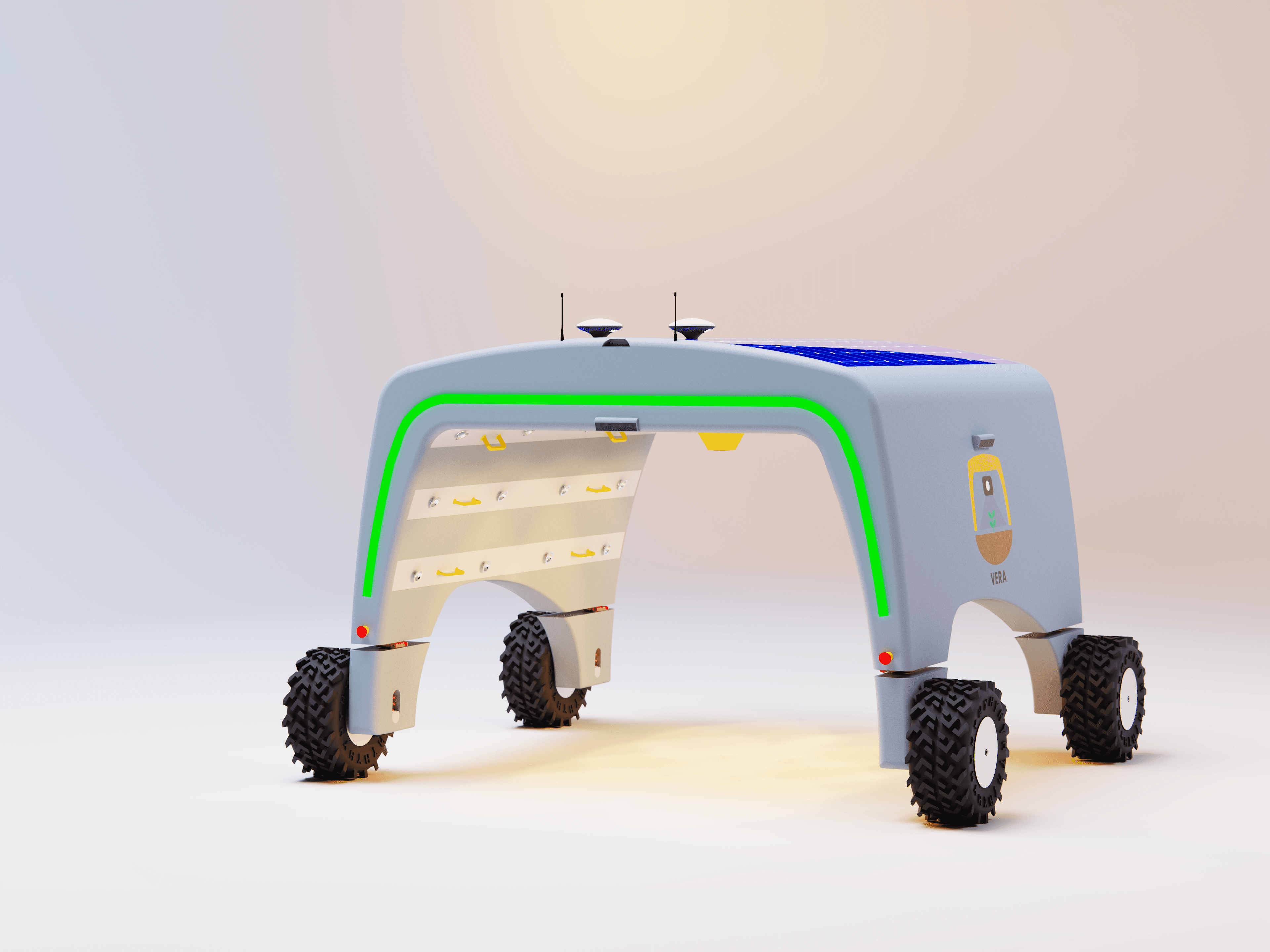
The design was also optimized to move over as many common crops and strip widths as possible. The double-curved roof was simplified to reduce production costs and allow full solar panel integration. Grab-steering wheels were introduced for easier movement across the field, while the lights were made replaceable to support the spectral scanning needs of different crops. Modularity was also integrated into the roof, enabling farmers to easily replace broken components and reduce both cost and downtime.
The design was also optimized to move over as many common crops and strip widths as possible. The double-curved roof was simplified to reduce production costs and allow full solar panel integration. Grab-steering wheels were introduced for easier movement across the field, while the lights were made replaceable to support the spectral scanning needs of different crops. Modularity was also integrated into the roof, enabling farmers to easily replace broken components and reduce both cost and downtime.
Hands-on testing showed that the design could not capture meaningful hyperspectral images.
Redesigning for better spectral scans.
The best form was refined to better replicate lab conditions for accurate scans.
Refining the design based on feedback.
Refining the design based on feedback.
Refining the design based on feedback.





Following further feedback, the modular box was integrated into the robot’s roof to improve ergonomics. The camera received a refined housing, the necessary antennas were added, and base-station charging was replaced with a charging port.
Following further feedback, the modular box was integrated into the robot’s roof to improve ergonomics. The camera received a refined housing, the necessary antennas were added, and base-station charging was replaced with a charging port.
Integrated for better ergonomics, cleaner hardware, and simpler charging.
Exploring suitable materials.
Evaluating different material options.
Evaluating different material options.
Evaluating different material options.


Designing VERA for manufacturability.

The modular box containers were designed for injection molding, with draft angles added where needed to support the manufacturing process.
The modular box containers were designed for injection molding, with draft angles added where needed to support the manufacturing process.
Adapted for injection molding with proper draft angles.
VERA’s frame is built from six U-shaped beams with welded steel plates, creating a structure that is both lightweight and strong.
VERA’s frame is built from six U-shaped beams with welded steel plates, creating a structure that is both lightweight and strong.
Built from six U-shaped beams for a lightweight, strong structure.


Each modular box has its own compartment.
Each modular box has its own compartment.
Each modular box has its own compartment.
Designing VERA for manufacturability.
Exploring suitable materials.
Final concept
Final concept
Final concept
VERA moves autonomously across the field at around 4 km/h.
VERA moves autonomously across the field at around 4 km/h.
VERA moves autonomously across the field at around 4 km/h.

VERA captures crop data with a multispectral camera.
VERA captures crop data with a multispectral camera.
VERA captures crop data with a multispectral camera.
An image every two seconds, so no plant is missed.
An image every two seconds, so no plant is missed.
An image every two seconds, so no plant is missed.


All imaging data is quickly processed on board by the NVIDIA Jetson Nano.
All imaging data is quickly processed on board by the NVIDIA Jetson Nano.
All imaging data is quickly processed on board by the NVIDIA Jetson Nano.
A trained computer vision model analyzes the 520–540 nm range to detect early plant stress and the 710–720 nm range to identify plant damage.
A trained computer vision model analyzes the 520–540 nm range to detect early plant stress and the 710–720 nm range to identify plant damage.
A trained computer vision model analyzes the 520–540 nm range to detect early plant stress and the 710–720 nm range to identify plant damage.


All data is clearly presented in the online software, where the farmer can also control the robot. The software operates on a subscription-based license model.
All data is clearly presented in the online software, where the farmer can also control the robot. The software operates on a subscription-based license model.
One online platform for data, control, and monitoring.
Easy field mobility through crab steering.
Easy field mobility through crab steering.
Easy field mobility through crab steering.


By using four Intel RealSense depth cameras, VERA achieves 360-degree obstacle detection. The farmer can also monitor the robot live and intervene when needed. In the future, this creates the foundation for intelligent obstacle detection through a properly trained AI model that is currently in development.
Four depth cameras give VERA 360-degree obstacle detection and live monitoring.
Four depth cameras give VERA 360-degree obstacle detection and live monitoring.
High-quality scans with removable, crop-specific lighting.
High-quality scans with removable, crop-specific lighting.
High-quality scans with removable, crop-specific lighting.


VERA features a modular design in which “BLOX” containing different components can be easily swapped to replace faulty parts or upgrade the system. This reduces downtime and extends the robot’s lifespan.
Swappable BLOX reduce downtime and extend lifespan.
Swappable BLOX reduce downtime and extend lifespan.
Easy charging through a CEE connector.
Easy charging through a CEE connector.
Easy charging through a CEE connector.


More operating time, less CO₂, thanks to solar power.
More operating time, less CO₂, thanks to solar power.
More operating time, less CO₂, thanks to solar power.
Multiple emergency stops for quick intervention.
Multiple emergency stops for quick intervention.
Multiple emergency stops for quick intervention.

Multiple antennas ensure that VERA maintains a stable internet and RTK signal at all times. For off-grid operations, a Starlink module can be integrated, allowing VERA to be controlled from virtually anywhere.
Stable internet and RTK, with optional off-grid control via Starlink.
Stable internet and RTK, with optional off-grid control via Starlink.
This is VERA:
an autonomous field robot designed to help farmers transition to more sustainable agriculture. By identifying diseased plants at an early stage, VERA enables timely intervention, reducing pesticide use and helping improve crop yield.
This is VERA:
an autonomous field robot designed to help farmers transition to more sustainable agriculture. By identifying diseased plants at an early stage, VERA enables timely intervention, reducing pesticide use and helping improve crop yield.
This is VERA:
an autonomous field robot designed to help farmers transition to more sustainable agriculture. By identifying diseased plants at an early stage, VERA enables timely intervention, reducing pesticide use and helping improve crop yield.